
Page 35 - GE-634 組裝說明書 - Pro'sKit 寶工科學玩具
P. 35
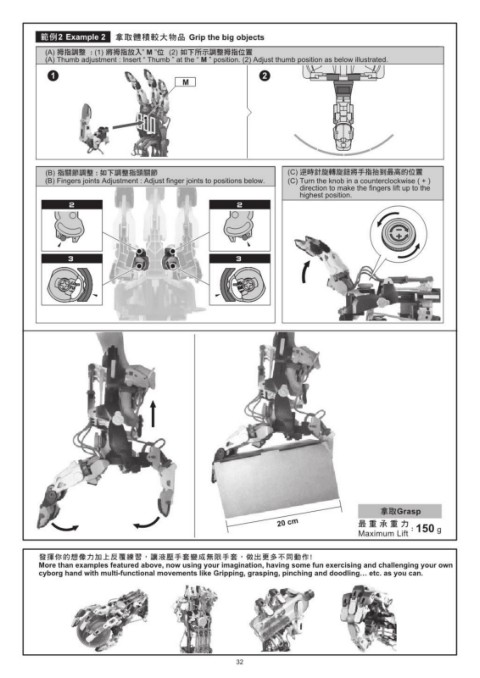
ᇍԷ2 Example 2 ࣅ՟ጐ༰ɽيۜ Grip the big objects
(A) רܸሜ (1) ਗ਼רܸ׳ɝ” M ”З (2) νɨהͪሜרܸЗໄ
(A) Thumb adjustment : Insert “ Thumb ” at the “ M ” position. (2) Adjust thumb position as below illustrated.
1 2
M
(B) ܸᗫືሜ νɨሜܸ᎘ᗫື (C) ࣛ০ૅᔷૅඐਗ਼˓ܸױՑ௰৷ٙЗໄ
(B) Fingers joints Adjustment : Adjust finger joints to positions below. (C) Turn the knob in a counterclockwise ( + )
direction to make the fingers lift up to the
highest position.
2 2
3 3
ࣅ՟Grasp
20 cm ௰ࠠוࠠɢ
Maximum Lift 150 g
೯౨Ыٙซ྅ɢ̋ɪˀᔧᇖ୦dᜫ૰Ꮐ˓ࢁᜊϓೌࠢ˓ࢁdਂ̈һεʔΝਗЪ
More than examples featured above, now using your imagination, having some fun exercising and challenging your own
cyborg hand with multi-functional movements like Gripping, grasping, pinching and doodling… etc. as you can.
32